

creating Helping hands
FESTO
Ballbot
Workers and robots will work together more and more closely in the future. That's why we are working intensively with FESTO on systems that could relieve humans of monotonous or hazardous tasks, for example, and at the same time pose no risk. Artificial intelligence plays a central role here.

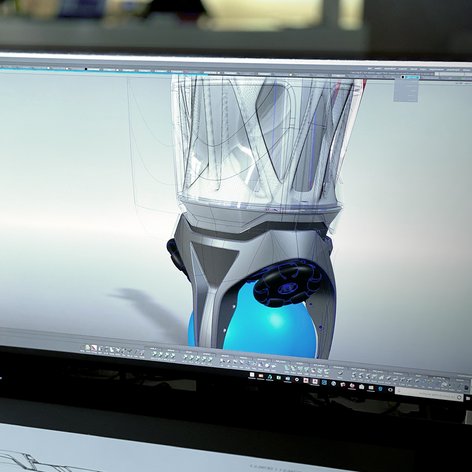




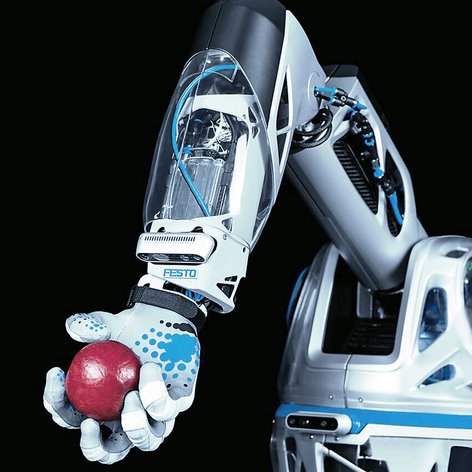

image courtesy of FESTO SE&Co.KG
